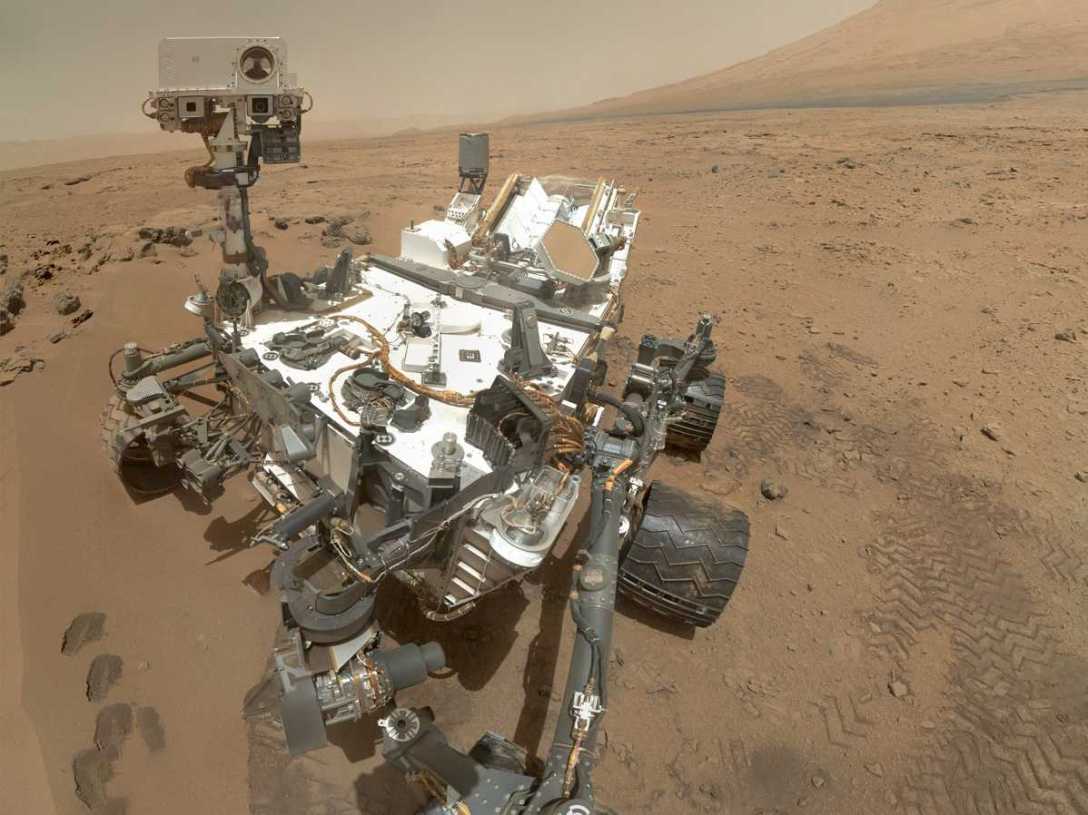
It takes a radio signal between 8 and 22 minutes to travel the distance between Mars and Earth, giving a roundtrip time between 16 and 44 minutes. The effect of this is that remote-control as we find it on the Earth does not work.
The consequence is that a vehicles like NASA´s Curiosity (picture) must the able to sense its environment, analyse the operational situation and plan and execute actions in line with its mission assignment. This makes Curiosity an implementation of what I have classified as a system of action.
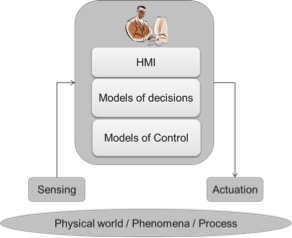
From a computer scientists perspective such systems are built using methodologies and technologies rooted in control theory, signal processing, pattern recognition and artifcial intelligence. Control theory is typically applied to solve sub-second vehicle control challenges and artificial intelligence underpins the vehicles tactical planning and decision making, including interaction with the human operator for strategic guidance.
The technologies used for planning and decission making falls into the fields of constraint programming, automated planning and multi-agents. Automated planning is the application of finding the best possible action, given the constraints of the situation and the objectives of the task at hand. The resulting logic is packaged into packages of collaborating agents facilitating a decoupled and flexible architecture.
It is though a paradox that while this class of technology is used to control space crafts on foreign planets, usage on similar problems here on planet Earth is more limited. That said, there is no doubt that more Earthly applications, it be optimisation of hospital operation rooms, supporting an drillers to mitigate problems avoiding to get stuck or to find the best possible action to take to maximise production while minimising energy usage are all examples of applications or problems that could benefit from being understood and solved as planning problems.
My claim is that software for automated planning and scheduling is one of the most underrated technologies in the market space. At the same time is it one of the most powerful technologies available. It provides beautiful solutions to a multitude of real world business problems. One such example from industry is the RDS robot.
Lets make 2016 the year of automated planning.